Elastse deformatsiooni energia. Mis on elastsete deformatsioonide potentsiaalne energia Elastse deformeerunud keha potentsiaalne energia on võrdne
Deformatsiooni suurust hinnatakse keha suuruse muutuse ja selle esialgse suuruse suhte järgi
Seda abstraktset arvu, mis näitab, millise kehaosa võrra on keha suurus suurenenud või vähenenud, nimetatakse suhteliseks deformatsiooniks.
Ümbersuunalise pinge või kokkusurumise korral tähendab x ruumala deformatsioonist põhjustatud ruumala suurenemist või vähenemist Pikisuunalise pinge või kokkusurumise korral x pikkust Nihke korral mõõdetakse deformatsiooni nihkenurgaga 6 (vt joonis 78, lk. 168).
Kui lõikate elastselt deformeerunud keha vaimselt kaheks osaks, siis üks neist osadest mõjub teisele teatud jõududega, mis jaotuvad kogu lõigu peale. Neid jõude nimetatakse sisemisteks elastsusjõududeks. Deformeerunud kehale mõjuvaid välisjõude tasakaalustavad sisemised elastsusjõud. Elastsusjõudude suurus ja suund sõltuvad deformatsiooni tüübist. Keha peab välismõjudele vastu seni, kuni sisejõudude intensiivsus ületab teatud piiri, misjärel keha kas kaotab oma elastsed omadused või vajub kokku.
Elastsusjõudude intensiivsust iseloomustab ristlõike pindalaühiku kohta mõjuva jõu suurus, mis on võetud mõjuvate jõudude suhtes normaalses või tangentsiaalses suunas. Neid suurusi nimetatakse deformeerunud keha normaal- ja nihkepingeteks. Jõude ühtlase jaotuse korral on pinge leidmiseks vaja jõud jagada ristlõikepinnaga, mille peale see jõud jaotub:
Tavalist stressi, mis surub keha kokku, nimetatakse ka rõhuks.
Rääkides rõhust või pingest mis tahes punktis, mõistame tavaliselt "punkti" kui elementaarset väikest pinna pindala. Pinge teatud punktis tähendab suhet.
Rõhu mõõtmiseks kasutatakse erinevaid ühikuid. Absoluutsüsteemis on jõu ühikuks 1 düün ja pindalaühikuks, seetõttu on rõhu ühikuks nn baarium.
Inseneritöös on rõhu ühikuks sageli
Rõhuühikutena kasutatakse ka füüsikalisi ja tehnilisi keskkondi. Füüsikaline (tavaline) atmosfäär on rõhk, mis oma raskusega tekitab elavhõbedasamba kõrgusega 100. On lihtne arvutada, et füüsiline atmosfäär
Inglise füüsik Robert Hooke leidis 1675. aastal, et deformeerunud keha pinge on võrdeline suhtelise pingega:
Koefitsienti K nimetatakse elastsusmooduliks.
Hooke'i seadus kehtib ainult teatud piirini. Teatud pinge korral rikutakse otsest proportsionaalsust stressi ja pinge vahel. Seda pinget nimetatakse proportsionaalsuse piiriks.Veidi suurema pinge korral, mida nimetatakse elastsuse piiriks, kaotab keha oma elastsed omadused; välisjõudude kõrvaldamisel ei taastu keha kuju täielikult; jääb nn jääkdeformatsiooniks.

Riis. 77. Deformeerimisel tehtavate tööde ajakava.
Kui kõik keha füüsikalised omadused, eelkõige elastsed omadused, on ükskõik millises kehaosas igas suunas ühesugused, siis nimetatakse keha isotroopseks. Klaasjad tahked ained on tavaliselt isotroopsed. Kristallides ei ole mõned füüsikalised omadused, eriti elastsus, eri suundades samad. Selliseid kehasid nimetatakse anisotroopseteks.
Välisjõudude töö muundub keha elastse deformatsiooni käigus deformeerunud keha potentsiaalseks energiaks.
Potentsiaalne energia on olemas interakteeruvate kehade süsteemi jaoks. Kuid ka eraldi deformeerunud kehal on seda tüüpi energiat. Sel juhul sõltub potentsiaalne energia kehaosade suhtelisest asendist.
Elastne pingeenergia
Kui traadile riputatud koorem venitab vedrustust ja langeb, siis gravitatsioon teeb tööd. Tänu sellisele tööle suureneb deformeerunud keha energia, mis on pingevabast seisundist üle läinud pingesesse. Selgub, et deformatsiooni käigus suureneb keha siseenergia. Keha siseenergia kasvu eesmärk on suurendada potentsiaalset energiat, mis on seotud keha molekulide suhtelise asendiga. Kui tegemist on elastse deformatsiooniga, siis peale koormuse eemaldamist lisaenergia kaob ja tänu sellele elastsusjõud toimivad. Elastse deformatsiooni käigus tahkete ainete temperatuur oluliselt ei tõuse. See on nende oluline erinevus gaasidest, mis kokkusurumisel kuumenevad. Plastilise deformatsiooni korral võivad tahked ained oma temperatuuri oluliselt tõsta. Temperatuuri tõus ja sellest tulenevalt ka molekulide kineetilise energia tõus peegeldab keha siseenergia suurenemist plastilise deformatsiooni käigus. Sel juhul toimub ka siseenergia suurenemine deformatsiooni põhjustavate jõudude töö tõttu.
Vedru venitamiseks või kokkusurumiseks peate tegema tööd (), mis on võrdne:

kus - vedru pikkuse muutust iseloomustav väärtus (vedru pikenemine); - vedru elastsuse koefitsient. See töö muudab vedru potentsiaalset energiat ():

Avaldise (2) kirjutamisel eeldame, et vedru potentsiaalne energia ilma deformatsioonita on võrdne nulliga.
Elastselt deformeerunud varda potentsiaalne energia
Elastselt deformeerunud varda potentsiaalne energia pikisuunalise deformatsiooni ajal on võrdne:

kus on Youngi moodul; - suhteline laiend; - varda maht. Ühtlase deformatsiooniga homogeense varda puhul võib elastse deformatsiooni energiatiheduse leida järgmiselt:

Kui varda deformatsioon on ebaühtlane, siis valemi (3) abil varda punkti energia leidmiseks asendatakse sellesse valemisse vaadeldava punkti väärtus.
Elastse deformatsiooni energiatihedus nihkes leitakse avaldise abil:

kus on nihkemoodul; - suhteline nihe.
Näited probleemide lahendamisest
NÄIDE 1
| Harjutus | Killast tulistamisel massiline kivi hakkas lendama kiirusega . Kui suur on kada kumminööri elastsuse koefitsient, kui nöör sai lasu ajal pikenemise? Arvestage, et nööri ristlõike muutust võib tähelepanuta jätta. |
| Lahendus | Laske ajal muudetakse venitatud nööri () potentsiaalne energia kivi () kineetiliseks energiaks. Vastavalt energia jäävuse seadusele võime kirjutada: Kummist nööri elastse deformatsiooni potentsiaalse energia leiame järgmiselt:
kus on kummi elastsuse koefitsient, kivi kineetiline energia:
seega
Kummi jäikuse koefitsiendi väljendame (1.4): |
| Vastus |



NÄIDE 2
| Harjutus | Jäikusega vedru surutakse kokku jõuga, mille suurus on võrdne . Kui suur on sama vedru täiendava kokkusurumise korral rakendatud jõu töö () teise jaoks? |
| Lahendus | Teeme joonise. |
Potentsiaalset energiat võib omada mitte ainult vastastikku toimivate kehade süsteem, vaid ka eraldi võetud elastselt deformeeritud keha (näiteks kokkusurutud vedru, venitatud varras jne). Sel juhul sõltub potentsiaalne energia keha üksikute osade suhtelisest asendist (näiteks vedru külgnevate mähiste vahelisest kaugusest).
Määrame töö, mis tuleb vedru venitamiseks (või kokkusurumiseks) kulutada summa "x" võrra (joonis 3.8). Eeldame, et vedru järgib Hooke'i seadust, s.t. elastsusjõud on võrdeline deformatsiooniga. Me venitame vedru väga aeglaselt, nii et jõudu, millega me vedrule mõjume, võib alati pidada elastsusjõuga võrdseks. Edasi eeldame, et jõud toimib nihke suunas, st. .
Eelneva põhjal saame kirjutada F ext. = -F nt. = kx, kus x on vedru pikenemine, k on vedru jäikus ning Hooke'i seaduse järgi on elastsusjõu ja nihke suund vastupidine (elastsusjõud on tingitud osakeste (molekulide ja aatomid) ja on oma olemuselt lõpuks elektrilised).
Laske jõul vedru võrra venitada dx, Siis dA=F dx=k x dx.
See töö läheb vedru potentsiaalse energia suurendamiseks. Eeldusel, et deformeerimata vedru potentsiaalne energia on "0" ( U 1 = 0) saame
on vedru elastse deformatsiooni potentsiaalne energia.
Kõik selle jaotise teemad:
Paar sissejuhatavat märkust füüsika teema kohta
Meid ümbritsev maailm on materiaalne: see koosneb igavesti eksisteerivast ja pidevalt liikuvast ainest. Mateeria selle sõna laiemas tähenduses on kõik, mis looduses tegelikult eksisteerib ja m
Mehaanika
Aine lihtsaim liikumise vorm on mehaaniline liikumine. MÄÄRATLUS: mehaaniline liikumine – kehade või nende osade suhtelise asendi muutumine ruumis üksteise suhtes
Materiaalse punkti liikumise kinemaatika. Liikumise omadused
Materiaalse punkti M asukohta ruumis antud ajahetkel saab anda raadiusvektoriga (vt joonis fig.
Kiirusvektor. Keskmine ja hetkeline kiirus
Erinevate kehade liikumised erinevad selle poolest, et kehad läbivad samade (võrdsete) ajavahemike jooksul erinevaid vahemaid.
Ebaühtlase liikumisega rada
Väikese aja jooksul Dt kujutatakse liikumist graafiliselt ristkülikuna, mille kõrgus on võrdne
Kurviline kiirendus (tangentsiaalne ja normaalkiirendus)
Kui materiaalse punkti liikumise trajektoor on kõverjoon, siis nimetame sellist liikumist kõverjooneliseks. Sellise liigutusega
Nurkkiirus
Definitsioon: Pöörlevaks liikumiseks nimetatakse sellist liikumist, milles absoluutselt jäiga keha kõik punktid kirjeldavad ringjooni, mille keskpunktid asuvad ühel sirgel, mida nimetatakse teljeks.
Nurkkiirendus
Nurkkiiruse vektor võib muutuda nii keha ümber telje pöörlemiskiiruse muutumise tõttu (antud juhul
Lineaar- ja nurkkiiruse seos
Laske kehal lühikese aja jooksul Dt pöörata läbi nurga Dj (joonis 2.17). Teljest kaugusel R asuv punkt läbib tee DS = R×Dj. A-prioor
Dünaamika
Mehaanika osa, mis uurib seadusi ja põhjusi, mis põhjustavad kehade liikumist, s.o. uurib materiaalsete kehade liikumist neile rakendatavate jõudude toimel. Klassikalise (Newtoni) karusnaha keskmes
Newtoni seadus
MÄÄRATLUS: Iga keha kiirendus on võrdeline sellele mõjuva jõuga ja pöördvõrdeline keha massiga:
Newtoni seadus
Igal kehade toimel üksteisele on vastastikmõju iseloom: kui keha M1 mõjub kehale M2 mingi jõuga f12, siis keha M2 omakorda
Pulss. Impulsi jäävuse seadus
Mehaanilises süsteemis, mis koosneb mitmest kehast, eksisteerivad nii süsteemi kehade vastasmõju jõud, mida nimetatakse sisemiseks, kui ka nende kehade vastasmõju jõud kehadega, mida see ei hõlma.
Töö ja energia
Laske kehal, millel jõud mõjub, läbida, liikudes mööda kindlat trajektoori, teed S. Sel juhul mõjub jõud kas alates
Võimsus
Praktikas pole oluline mitte ainult tehtud töö maht, vaid ka aeg, mille jooksul seda tehakse. Kõigist mehhanismidest on kõige tulusamad need, mis töötavad vähema ajaga
Energia
Kogemusest teame, et kehad on sageli võimelised tegema tööd teiste kehadega. MÄÄRATLUS: Füüsikaline suurus, mis iseloomustab keha või kehade süsteemi töövõimet
Keha kineetiline energia
Vaatleme kõige lihtsamat süsteemi, mis koosneb ühest osakesest (materiaalsest punktist). Kirjutame üles osakeste liikumise võrrandi
Potentsiaalne jõudude väli. Konservatiivsed ja mittekonservatiivsed jõud
Kui osakest (keha) igas ruumipunktis mõjutavad teised kehad, siis öeldakse, et see osake (keha) asub jõudude väljas. Näide: 1. Osake pöörde lähedal
Keha potentsiaalne energia gravitatsiooniväljas (Maa gravitatsiooniväljas)
Maa gravitatsiooniväli on jõuväli, seetõttu kaasneb keha igasuguse liikumisega jõuväljas töö tegemine selle välja jõudude poolt. Keha potentsiaalse energia määramiseks, leidmine
Potentsiaalne energia gravitatsiooniväljas (universaalse gravitatsiooni valdkonnas)
Newtoni kehtestatud universaalse gravitatsiooniseadus kõlab järgmiselt: MÄÄRATLUS: Gravitatsioonijõud ehk gravitatsioonijõud on jõud, millega kaks materiaalset punkti teineteist tõmbavad.
Energia jäävuse seadus
Üldisust kaotamata vaatleme süsteemi, mis koosneb kahest osakestest massiga m1 ja m2. Laske osakestel üksteisega jõududega suhelda
Jäiga keha translatsiooniline liikumine
MÄÄRATLUS: Absoluutselt jäik keha on keha, mille deformatsioonid võib vaadeldava probleemi tingimustes tähelepanuta jätta. või absoluutselt jäik keha
Jäiga keha pöörlev liikumine
Definitsioon: Jäiga keha pöörlevaks liikumiseks nimetatakse sellist liikumist, mille käigus kõik keha punktid liiguvad mööda ringjooni, mille keskpunktid asuvad samal sirgel, nn.
keha hoogu
Pöörleva liikumise kirjeldamiseks on vaja veel ühte suurust, mida nimetatakse nurkimpulsiks. Esiteks
Pöörleva liikumise dünaamika põhivõrrand
Vaatleme materiaalsete punktide süsteemi, millest igaüks võib liikuda, jäädes ühte Z-telge läbivatest tasapindadest (joon. 4.15). Kõik tasapinnad võivad nurgaga pöörata ümber Z-telje
Pöörleva jäiga keha kineetiline energia
1. Vaatleme keha pöörlemist ümber fikseeritud telje Z. Jagame kogu keha elementaarmasside hulgaks m
Välisjõudude töö jäiga keha pöörlemisel
Leiame töö, mida jõud teevad, kui keha pöörleb ümber fikseeritud telje Z. Olgu toime massile
Vooluliinid ja torud
Hüdrodünaamika uurib vedelike liikumist, kuid selle seadused kehtivad ka gaaside liikumise kohta. Statsionaarse vooluga
Bernoulli võrrand
Vaatleme ideaalset kokkusurumatut vedelikku, milles puudub sisehõõrdumine (viskoossus). Toome eraldi välja
Sisehõõrdejõud
Viskoossus on omane tõelisele vedelikule, mis väljendub selles, et igasugune vedeliku ja gaasi liikumine on spontaanne.
Laminaarsed ja turbulentsed voolud
Piisavalt väikese vedeliku kiiruse korral täheldatakse kihilist või laminaarset voolu, kui vedelikukihid libisevad üksteise suhtes ilma segunemiseta. Laminaarse t-ga
Vedeliku vool ümmarguses torus
Kui vedelik liigub ümmarguses torus, on selle kiirus toru seintel null ja maksimaalne toru teljel. Eeldusel
Kehade liikumine vedelikes ja gaasides
Kui sümmeetrilised kehad liiguvad vedelikes ja gaasides, tekib tõmbejõud, mis on suunatud keha kiirusele vastupidiselt. Laminaarses voolus ümber palli, voolujoon
Kepleri seadused
17. sajandi alguseks oli enamik teadlasi lõpuks veendunud maailma heliotsentrilise süsteemi kehtivuses. Tollastel teadlastel polnud aga selged ei planeetide liikumise seadused ega põhjused, mis määravad
Cavendishi kogemus
Esimene edukas katse "g" määramiseks oli Cavendishi (1798) tehtud mõõtmised, kes taotlesid
Gravitatsioonivälja intensiivsus. Gravitatsioonivälja potentsiaal
Gravitatsiooniline interaktsioon toimub gravitatsioonivälja kaudu. See väli väljendub selles, et teine sellesse asetatud keha on jõu mõju all. Gravitatsiooni "intensiivsuse" kohta
Relatiivsusteooria põhimõte
Sekundis 2.1. mehaaniliste süsteemide jaoks sõnastati järgmine relatiivsusprintsiip: kõigis inertsiaalsetes tugisüsteemides on kõik mehaanika seadused ühesugused. Mitte ükski (karusnahk
Spetsiaalse (era)relatiivsusteooria postulaadid. Lorentzi teisendused
Einstein sõnastas kaks postulatsiooni, mis on erirelatiivsusteooria aluseks: 1. Füüsikalised nähtused kõigis inertsiaalsetes tugisüsteemides kulgevad ühtemoodi. Mitte ühtegi
Lorentzi teisenduste tagajärjed
Relatiivsusteooria kõige ootamatum tagajärg on aja sõltuvus võrdlusraamistikust. Sündmuste kestus erinevates võrdlusraamistikes. Lase mingil hetkel
Sündmuste vaheline intervall
Relatiivsusteoorias võetakse kasutusele sündmuse mõiste, mille määrab toimumise koht ja toimumise aeg. Sündmust saab kujutada kujuteldava neljamõõtmelise punktiga
Harmoonilise võnkeliikumise võrrand
Mõnda keha massiga m mõjugu kvaasielastne jõud, mille toimel keha omandab kiirenduse
Harmooniliste võnkumiste graafiline esitus. vektordiagramm
Mitme samasuunalise võnke liitmine (või mis seesama, mitme harmoonilise funktsiooni liitmine) on oluliselt hõlbustatud ja saab selgeks, kui kujutada graafiku võnkumisi.
Võnkuva keha kiirus, kiirendus ja energia
Tuleme tagasi harmoonilise võnkeprotsessi nihke x, kiiruse v ja kiirenduse a valemite juurde. Olgu meil keha massiga "m", mis toimib kvaasi toimel
Harmooniline ostsillaator
Süsteem, mida kirjeldab võrrand, kus
füüsiline pendel
MÄÄRATLUS: Füüsiliseks pendliks nimetatakse jäika keha, mis on võimeline objekti ümber võnkuma.
summutatud vibratsioonid
Harmooniliste võnkumiste võrrandi tuletamisel eeldati, et võnkepunkt on ainult kvaasielastse jõu mõjul. Igas reaalses võnkesüsteemis eksisteerivad alati vastupanujõud
Sunnitud vibratsioonid. Resonants
Selleks, et süsteem teostaks summutamata võnkumisi, on vaja täiendada väljastpoolt tulevast hõõrdumisest tingitud võnkumiste energiakadusid. Selleks, et süsteemi võnkumiste energia ei väheneks, viiakse tavaliselt sisse jõud, per
Molekulaarfüüsika õppeaine ja meetodid
Molekulaarfüüsika on füüsika haru, mis uurib aine ehitust ja omadusi nn molekulaar-kineetiliste kontseptsioonide alusel. Nende ideede järgi mis tahes keha
Termodünaamiline süsteem. Süsteemi oleku valikud. Tasakaaluline ja mittetasakaalu olek
MÄÄRATLUS: Termodünaamiline süsteem on kehade kogum, mis vahetab energiat nii omavahel kui ka ümbritsevate kehadega. Süsteemi näide on vedelik
Ideaalne gaas. Ideaalsed gaasi oleku parameetrid
MÕISTE: Ideaalne gaas on gaas, mille omadusi arvestades on täidetud järgmised tingimused: a) sellise gaasi molekulide kokkupõrked toimuvad elastsete kuulide kokkupõrkena, mõõtmed
Gaasiseadused
Kui lahendame ideaalse gaasi olekuvõrrandi mis tahes parameetri suhtes, siis n
Universaalse gaasikonstandi füüsikaline tähendus
Universaalse gaasikonstandi töö mõõde on 1 mooli kohta ja temperatuur on 1 °K.
Gaaside kineetilise teooria põhivõrrand
Kui eelmises osas kasutati termodünaamilist uurimismeetodit, siis selles osas kasutatakse molekulaarsete protsesside uurimise statistilist meetodit. Põhineb uuringul koos
baromeetriline valem. Boltzmanni jaotus
Juba ammu on teada, et gaasi rõhk Maa pinna kohal väheneb kõrgusega. mõne jaoks atmosfäärirõhk
Molekulide Maxwelli kiirusjaotus
Kokkupõrgete tulemusena vahetavad molekulid kiirusi ning kolmekordsete ja keerukamate kokkupõrgete korral võib molekul olla ajutiselt väga suurte ja väga madalate kiirustega. Kaootiline liikumine
ülekande nähtused. Molekulide keskmine vaba tee
Eelmistes osades käsitlesime kehade omadusi termilises tasakaalus. See osa on pühendatud protsessidele, mille abil tasakaaluseisund saavutatakse. Sellised protsessid
difusiooni nähtus
Difusioon on külgnevate ainete molekulide vastastikuse tungimise protsess termilise liikumise tõttu. Seda protsessi täheldatakse gaasides, vedelikes ja tahketes ainetes.
Soojusjuhtivuse ja viskoossuse nähtus
Aine soojusjuhtivuse nähtus määrab palju väga olulisi tehnilisi protsesse ja seda kasutatakse laialdaselt erinevates arvutustes. Soojusjuhtivuse empiiriline võrrand saadi prantsuse keeles
Ideaalse gaasi siseenergia
Termodünaamikas on oluline suurus keha siseenergia. Igal kehal võib lisaks mehaanilisele energiale olla ka siseenergia reserv, mis on seotud aatomite mehaanilise liikumisega ja
töö ja soojus. Termodünaamika esimene seadus
Gaasi (ja teiste termodünaamiliste süsteemide) siseenergia võib muutuda peamiselt kahe protsessi tõttu: gaasiga töötamine
Gaasi isoprotsesside töö
Laske gaas sulgeda silindrilisse anumasse, mis on suletud tihedalt liibuva ja kergesti libiseva kolviga (joonis 10.3). Jne
Soojusmahtuvuse molekulaarkineetiline teooria
Keha C soojusmahtuvuseks nimetatakse füüsikalist suurust, mis on arvuliselt võrdne soojushulgaga, mis tuleb kehale anda, et keha soojendada ühe kraadi võrra. Kui ütlete kehale
adiabaatiline protsess
Koos isoprotsessidega on adiabaatiline protsess, mis on looduses laialt levinud. Adiabaatiline protsess on protsess, mis kulgeb ilma soojusvahetuseta välisega
Ringikujulised pöörduvad protsessid. Carnot' tsükkel
Mehaanilistel protsessidel on tähelepanuväärne omadus pööratavus. Näiteks kukkus visatud kivi, olles kirjeldanud teatud trajektoori, maapinnale. Kui see sama kiirusega tagasi visatakse, siis see kirjeldab
Entroopia mõiste. Ideaalse gaasi entroopia
Carnot' tsükli jaoks on valemitest (10.17) ja (10.21) lihtne saada seos Q1 /T1 - Q2 /T2 = 0. (10.22) Suurust Q/T nimetatakse
Termodünaamika teine seadus
Entroopia mõiste aitas sõnastada rangelt matemaatilisi mustreid, mis võimaldavad määrata termiliste protsesside suunda. Suur hulk eksperimentaalseid tõendeid näitab, et
Termodünaamika teise seaduse statistiline tõlgendus
Makroskoopilise keha (st tohutust arvust molekulidest moodustatud keha) olekut saab määrata ruumala, rõhu ja temperatuuri abil. See gaasi makroskoopiline olek teatud
Van der Waalsi võrrand
Reaalsete gaaside käitumist nende madalatel tihedustel kirjeldab hästi Clapeyroni võrrand:
Aine kriitiline olek
Van der Waalsi võrrandi tähtsus seisneb selles, et see ennustab konkreetselt
Joule-Thomsoni efekt
Päris gaasis toimivad molekulide vahel ligitõmbavad ja tõukejõud. Tõmbejõud on tingitud molekulide dipoolide vastasmõjust. Mõned molekulid võivad olla püsivad dipoodid
energiat nimetatakse skalaarseks füüsikaliseks suuruseks, mis on aine erinevate liikumisvormide üksikmõõt ja aine liikumise ühelt vormilt teisele ülemineku mõõt.
Aine erinevate liikumisvormide iseloomustamiseks tutvustatakse vastavaid energialiike, näiteks: mehaaniline, sisemine, elektrostaatilise energia, tuumasisene vastastikmõju jne.
Energia järgib jäävuse seadust, mis on üks olulisemaid loodusseadusi.
Mehaaniline energia E iseloomustab kehade liikumist ja vastastikmõju ning on kehade kiiruste ja suhteliste asendite funktsioon. See on võrdne kineetilise ja potentsiaalse energia summaga.
Kineetiline energia
Vaatleme juhtumit, kui massiline keha m mõjub konstantne jõud \(~\vec F\) (see võib olla mitme jõu resultant) ning jõu \(~\vec F\) ja nihke \(~\vec s\) vektorid on suunatud piki ühte sirget joon ühes suunas. Sel juhul saab jõu tehtud tööd määratleda kui A = F∙s. Jõumoodul vastavalt Newtoni teisele seadusele on F = m∙a ja nihkemoodul sühtlaselt kiirendatud sirgjoonelise liikumisega on see seotud initsiaali moodulitega υ 1 ja viimane υ 2 kiirust ja kiirendust A\(~s = \frac(\upsilon^2_2 - \upsilon^2_1)(2a)\) .
Seega, tööle saame
\(~A = F \cdot s = m \cdot a \cdot \frac(\upsilon^2_2 - \upsilon^2_1)(2a) = \frac(m \cdot \upsilon^2_2)(2) - \frac (m \cdot \upsilon^2_1)(2)\) . (1)
Nimetatakse füüsikalist suurust, mis võrdub poolega keha massist ja selle kiiruse ruudust keha kineetiline energia.
Kineetiline energia on tähistatud tähega E k .
\(~E_k = \frac(m \cdot \upsilon^2)(2)\) . (2)
Siis saab võrdsuse (1) kirjutada järgmisel kujul:
\(~A = E_(k2) - E_(k1)\) . (3)
Kineetilise energia teoreem
kehale rakendatavate resultantjõudude töö on võrdne keha kineetilise energia muutumisega.
Kuna kineetilise energia muutus on võrdne jõu tööga (3), siis keha kineetiline energia väljendub tööga samades ühikutes, s.o džaulides.
Kui kehamassi algkiirus m on null ja keha suurendab kiirust väärtuseni υ , siis on jõu töö võrdne keha kineetilise energia lõppväärtusega:
\(~A = E_(k2) - E_(k1)= \frac(m \cdot \upsilon^2)(2) - 0 = \frac(m \cdot \upsilon^2)(2)\) . (4)
Kineetilise energia füüsiline tähendus
Kiirusega υ liikuva keha kineetiline energia näitab, kui palju tööd peab puhkeolekus kehale mõjuv jõud selle kiiruse saavutamiseks tegema.
Potentsiaalne energia
Potentsiaalne energia on kehade vastasmõju energia.
Maast kõrgemale tõstetud keha potentsiaalne energia on keha ja Maa vahelise gravitatsioonijõudude vastasmõju energia. Elastselt deformeerunud keha potentsiaalne energia on keha üksikute osade vastastikmõju energia elastsusjõudude toimel.
potentsiaal helistas tugevus, mille töö sõltub ainult liikuva materjali punkti või keha alg- ja lõppasendist ning ei sõltu trajektoori kujust.
Suletud trajektoori korral on potentsiaalse jõu töö alati null. Potentsiaalsete jõudude hulka kuuluvad gravitatsioonijõud, elastsusjõud, elektrostaatilised jõud ja mõned teised.
Jõud, mille töö sõltub trajektoori kujust, nimetatakse mittepotentsiaalne. Materiaalse punkti või keha liigutamisel mööda suletud trajektoori ei võrdu mittepotentsiaalse jõu töö nulliga.
Keha ja Maa vastasmõju potentsiaalne energia
Leidke gravitatsiooniga tehtud töö F t keha liigutamisel massiga m vertikaalselt kõrguselt alla h 1 maapinnast kõrgemale kõrgusele h 2 (joonis 1). Kui erinevus h 1 – h 2 on tühine võrreldes Maa keskpunkti kaugusega, siis gravitatsioonijõuga F m keha liikumise ajal võib pidada konstantseks ja võrdseks mg.
Kuna nihe langeb suunaliselt kokku gravitatsioonivektoriga, siis gravitatsiooni poolt tehtav töö on
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
Vaatleme nüüd keha liikumist piki kaldtasandit. Keha liigutamisel kaldtasapinnast allapoole (joon. 2) gravitatsioon F t = m∙g teeb töö ära
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
Kus h on kaldtasandi kõrgus, s- nihkemoodul, mis on võrdne kaldtasandi pikkusega.

Keha liikumine punktist IN täpselt KOOS piki mis tahes trajektoori (joonis 3) võib vaimselt kujutada koosnevat liikumistest mööda erineva kõrgusega kaldtasandite lõike h’, h'' jne Töö A gravitatsioon lõpuni välja IN V KOOS on võrdne tee üksikute lõikude tööde summaga:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
Kus h 1 ja h 2 - kõrgused Maa pinnast, millel asuvad punktid vastavalt IN Ja KOOS.
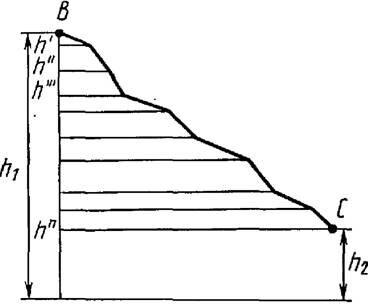
Võrdsus (7) näitab, et raskusjõu töö ei sõltu keha trajektoorist ja on alati võrdne raskusmooduli ja kõrguste erinevuse korrutisega alg- ja lõppasendis.
Alla liikudes on gravitatsiooni töö positiivne, üles liikudes negatiivne. Gravitatsiooni töö suletud trajektooril on null.
Võrdsust (7) võib esitada järgmiselt:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Füüsikalist suurust, mis võrdub keha massi korrutisega vabalangemise kiirenduse mooduliga ja kõrgusega, milleni keha on Maa pinnast kõrgemale tõstetud, nimetatakse potentsiaalne energia keha ja maa vastastikmõju.
Raskusjõu töö keha liigutamisel massiga m kõrgusel asuvast punktist h 2, kõrgusel asuvasse punkti h 1 Maa pinnalt on piki mis tahes trajektoori võrdne keha ja Maa vastastikmõju potentsiaalse energia muutusega, mis on võetud vastupidise märgiga.
\(~A = - (E_(p2) - E_(p1))\) . (9)
Potentsiaalne energia on tähistatud tähega E p .
Maast kõrgemale tõstetud keha potentsiaalse energia väärtus sõltub nulltaseme valikust, s.o kõrgusest, mille juures potentsiaalne energia eeldatakse nulliks. Tavaliselt eeldatakse, et Maa pinnal oleva keha potentsiaalne energia on null.
Selle nulltaseme valikuga potentsiaalne energia E p keha kõrgusel h Maapinnast kõrgemal on võrdne keha massi m ja vabalangemiskiirenduse mooduli korrutisega g ja vahemaa h see Maa pinnalt:
\(~E_p = m \cdot g \cdot h\) . (10)
Keha ja Maa vastastikmõju potentsiaalse energia füüsiline tähendus
Keha potentsiaalne energia, millele gravitatsioon mõjub, on võrdne gravitatsiooni poolt tehtava tööga keha liigutamisel nulltasemele.
Erinevalt translatsioonilise liikumise kineetilisest energiast, millel võivad olla ainult positiivsed väärtused, võib keha potentsiaalne energia olla kas positiivne või negatiivne. kehamass m kõrgusel h, Kus h < h 0 (h 0 - nullkõrgus), on negatiivse potentsiaalse energiaga:
\(~E_p = -m \cdot g \cdot h\) .
Gravitatsioonilise interaktsiooni potentsiaalne energia
Kahest materiaalsest punktist koosneva süsteemi ja masside gravitatsioonilise vastasmõju potentsiaalne energia m Ja M asub eemal rüks teisest on võrdne
\(~E_p = G \cdot \frac(M \cdot m)(r)\) . (üksteist)
Kus G on gravitatsioonikonstant ja potentsiaalse energia etalon null ( E p = 0) on aktsepteeritud r = ∞.
Keha gravitatsioonilise vastasmõju potentsiaalne energia massiga m maaga kus h on keha kõrgus maapinnast, M e on Maa mass, R e on Maa raadius ja potentsiaalse energia nullpunktiks on valitud h = 0.
\(~E_e = G \cdot \frac(M_e \cdot m \cdot h)(R_e \cdot (R_e +h))\) . (12)
Võrdlusnulli valimisel samadel tingimustel keha gravitatsioonilise vastasmõju potentsiaalne energia massiga m koos Maaga madalatel kõrgustel h (h « R e) on võrdne
\(~E_p = m \cdot g \cdot h\) ,
kus \(~g = G \cdot \frac(M_e)(R^2_e)\) on gravitatsioonikiirenduse moodul Maa pinna lähedal.
Elastselt deformeerunud keha potentsiaalne energia
Arvutame töö, mida teeb elastsusjõud, kui vedru deformatsioon (pikenemine) muutub mingist algväärtusest x 1 kuni lõpliku väärtuseni x 2 (joonis 4, b, c).

Vedru deformeerumisel muutub elastsusjõud. Elastsusjõu töö leidmiseks võib võtta jõumooduli keskmise väärtuse (sest elastsusjõud sõltub lineaarselt x) ja korrutada nihkemooduliga:
\(~A = F_(upr-cp) \cdot (x_1 - x_2)\) , (13)
kus \(~F_(upr-cp) = k \cdot \frac(x_1 - x_2)(2)\) . Siit
\(~A = k \cdot \frac(x_1 - x_2)(2) \cdot (x_1 - x_2) = k \cdot \frac(x^2_1 - x^2_2)(2)\) või \(~A = -\left(\frac(k \cdot x^2_2)(2) - \frac(k \cdot x^2_1)(2) \right)\) . (14)
Nimetatakse füüsikalist suurust, mis võrdub poolega keha jäikuse ja selle deformatsiooni ruudu korrutisest potentsiaalne energia elastselt deformeerunud keha:
\(~E_p = \frac(k \cdot x^2)(2)\) . (15)
Valemitest (14) ja (15) järeldub, et elastsusjõu töö on võrdne elastselt deformeerunud keha potentsiaalse energia muutusega, mis on võetud vastupidise märgiga:
\(~A = -(E_(p2) - E_(p1))\) . (16)
Kui x 2 = 0 ja x 1 = X, siis, nagu on näha valemitest (14) ja (15),
\(~E_p = A\) .
Deformeerunud keha potentsiaalse energia füüsikaline tähendus
elastselt deformeerunud keha potentsiaalne energia on võrdne tööga, mida teeb elastsusjõud, kui keha läheb olekusse, kus deformatsioon on null.
Potentsiaalne energia iseloomustab vastastikku toimivaid kehasid, kineetiline energia aga liikuvaid kehasid. Nii potentsiaalne kui ka kineetiline energia muutuvad ainult sellise kehade vastasmõju tulemusena, kus kehadele mõjuvad jõud teevad nullist erinevat tööd. Vaatleme küsimust energia muutumisest suletud süsteemi moodustavate kehade vastastikmõjude käigus.
suletud süsteem on süsteem, millele välised jõud ei mõju või nende jõudude tegevust ei kompenseerita. Kui mitu keha interakteeruvad üksteisega ainult gravitatsiooni- ja elastsusjõudude mõjul ja neile ei mõju ükski välisjõud, siis mis tahes kehade vastasmõju korral on elastsus- ehk gravitatsioonijõudude töö võrdne kehade potentsiaalse energia muutusega, võttes arvesse vastupidise märgiga:
\(~A = -(E_(p2) - E_(p1))\) . (17)
Kineetilise energia teoreemi järgi on samade jõudude töö võrdne kineetilise energia muutusega:
\(~A = E_(k2) - E_(k1)\) . (18)
Võrdluste (17) ja (18) võrdlus näitab, et kehade kineetilise energia muutus suletud süsteemis on absoluutväärtuses võrdne kehade süsteemi potentsiaalse energia muutusega ja on vastupidise märgiga:
\(~E_(k2) - E_(k1) = -(E_(p2) - E_(p1))\) või \(~E_(k1) + E_(p1) = E_(k2) + E_(p2) \) . (19)
Energia jäävuse seadus mehaanilistes protsessides:
suletud süsteemi moodustavate ning gravitatsiooni- ja elastsusjõudude mõjul üksteisega vastastikmõjus olevate kehade kineetilise ja potentsiaalse energia summa jääb konstantseks.
Kehade kineetilise ja potentsiaalse energia summat nimetatakse täis mehaaniline energia.
Teeme lihtsa katse. Viska üles teraskuul. Olles teatanud algkiiruse υ alguse, anname sellele kineetilise energia, mille tõttu see hakkab ülespoole tõusma. Gravitatsiooni toime viib palli kiiruse ja seega ka selle kineetilise energia vähenemiseni. Kuid pall tõuseb üha kõrgemale ja omandab üha rohkem potentsiaalset energiat ( E p= m∙g∙h). Seega ei kao kineetiline energia jäljetult, vaid see muundatakse potentsiaalseks energiaks.
Trajektoori tipppunkti jõudmise hetkel ( υ = 0) pall on täielikult ilma kineetilisest energiast ( E k = 0), kuid samal ajal muutub selle potentsiaalne energia maksimaalseks. Seejärel muudab pall suunda ja liigub kasvava kiirusega alla. Nüüd toimub potentsiaalse energia vastupidine muundumine kineetiliseks energiaks.
Energia jäävuse seadus näitab füüsiline tähendus mõisted tööd:
gravitatsiooni- ja elastsusjõudude töö võrdub ühelt poolt kineetilise energia suurenemisega ja teiselt poolt kehade potentsiaalse energia vähenemisega. Seetõttu võrdub töö ühest vormist teise muundatud energiaga.
Mehaanilise energia muutmise seadus
Kui interakteeruvate kehade süsteem ei ole suletud, siis selle mehaaniline energia ei säili. Sellise süsteemi mehaanilise energia muutus on võrdne välisjõudude tööga:
\(~A_(vn) = \Delta E = E - E_0\) . (20)
Kus E Ja E 0 on süsteemi mehaanilised koguenergiad vastavalt lõpp- ja algolekus.
Sellise süsteemi näide on süsteem, milles koos potentsiaalsete jõududega toimivad ka mittepotentsiaalsed jõud. Hõõrdejõud on mittepotentsiaalsed jõud. Enamikul juhtudel, kui nurk hõõrdejõu vahel F r keha on π radiaani, on hõõrdejõu töö negatiivne ja võrdne
\(~A_(tr) = -F_(tr) \cdot s_(12)\) ,
Kus s 12 - keha teekond punktide 1 ja 2 vahel.
Süsteemi liikumise ajal tekkivad hõõrdejõud vähendavad selle kineetilist energiat. Selle tulemusena väheneb suletud mittekonservatiivse süsteemi mehaaniline energia alati, muutudes mittemehaaniliste liikumisvormide energiaks.
Näiteks mööda horisontaalset teelõigu liikuv auto läbib pärast mootori väljalülitamist teatud vahemaa ja peatub hõõrdejõudude mõjul. Auto edasiliikumise kineetiline energia võrdus nulliga ja potentsiaalne energia ei suurenenud. Auto pidurdamisel kuumenesid piduriklotsid, autorehvid ja asfalt. Järelikult hõõrdejõudude toimel auto kineetiline energia ei kadunud, vaid muutus molekulide soojusliikumise siseenergiaks.
Energia jäävuse ja muundamise seadus
igas füüsilises interaktsioonis muundub energia ühest vormist teise.
Mõnikord nurk hõõrdejõu vahel F tr ja elementaarnihe Δ r on null ja hõõrdejõu töö on positiivne:
\(~A_(tr) = F_(tr) \cdot s_(12)\) ,
Näide 1. Võib väline jõud F tegutseb baaris IN, mis saab kärul libiseda D(joonis 5). Kui käru liigub paremale, siis libiseva hõõrdejõu töö F tr2, mis toimib kärule lati küljelt, on positiivne:

Näide 2. Kui ratas veereb, on selle veerehõõrdejõud suunatud piki liikumist, kuna ratta kokkupuutepunkt horisontaalpinnaga liigub ratta liikumise suunale vastupidises suunas ja hõõrdejõu töö on positiivne (Joonis 6):

Kirjandus
- Kabardin O.F. Füüsika: Ref. materjalid: Proc. toetus õpilastele. - M.: Valgustus, 1991. - 367 lk.
- Kikoin I.K., Kikoin A.K. Füüsika: Proc. 9 raku jaoks. keskm. kool - M .: Pro-sveshchenie, 1992. - 191 lk.
- Füüsika algõpik: Proc. toetust. 3 köites / Toim. G.S. Landsberg: v. 1. Mehaanika. Kuumus. Molekulaarfüüsika. – M.: Fizmatlit, 2004. – 608 lk.
- Yavorsky B.M., Seleznev Yu.A. Füüsika teatmik ülikoolidesse ja eneseharimisse kandideerijatele. – M.: Nauka, 1983. – 383 lk.
Potentsiaalset energiat võib omada mitte ainult vastastikku toimivate kehade süsteem, vaid ka eraldi võetud elastselt deformeeritud keha (näiteks kokkusurutud vedru, venitatud varras jne). Sel juhul sõltub potentsiaalne energia keha üksikute osade suhtelisest asendist (näiteks vedru külgnevate mähiste vahelisest kaugusest).
Vastavalt valemile (20.2) on nii vedru venitamiseks kui ka kokkusurumiseks summa i võrra vaja tööd kulutada. See töö läheb vedru potentsiaalse energia suurendamiseks. Seetõttu on vedru potentsiaalse energia sõltuvusel pikenemisest x kuju
kus on vedru jäikuse koefitsient (vt § 14). Valem (25.4) on kirjutatud eeldusel, et deformeerimata vedru potentsiaalne energia on null. Joonisel fig. 25.1 näitab graafikut U versus x.

Varda elastse pikisuunalise deformatsiooniga tehakse tööd, mis määratakse valemiga (20.3). Selle kohaselt on elastselt deformeerunud varda potentsiaalne energia võrdne
Siin E - Youngi moodul, - suhteline pikenemine, - varda maht;
Võtame arvesse elastse deformatsiooni u energiatihedust, mida defineerime energia dU suhtena ruumalasse, milles see on:
Kuna eeldatakse, et varras on homogeenne ja deformatsioon on ühtlane, st varda erinevates punktides sama, siis jaotub ka energia (25.2) varras ühtlaselt. Seetõttu võib seda pidada
![]()
See avaldis annab elastse deformatsiooni energiatiheduse pinges (või kokkusurumisel) ja juhul, kui deformatsioon on ebaühtlane. Viimasel juhul tuleb varda teatud punktis energiatiheduse leidmiseks asendada selle punkti väärtusega (25.4).